
En estos últimas semanas he estado jugando con mis primeras digitalizaciones de locomotoras. La primera máquina a la que he metido mano es esta bonita vaporosa de Roco.

¿Cómo es que tengo una máquina no Märklin? Sencillo, la máquina fue un regalo de un camiar – mi tio Vicente – al acabar la carrera. Mi tío había tenido la locomotora en una estantería y jamás la había hecho circular. Yo, cuando la recibí, tampoco contaba con infraestructura para hacerla correr, y antes de convertirla al sistema 3C (3 carriles) de Märklin, preferí guardarla hasta el día en que me animara a digitalizarla. La razón era simple, la conversión a digital 3C es mucho más sencilla que la conversión a analógica 3C.
Además, tras estudiar las páginas de «el tren digital» y de Antonio Martínez sobre digitalización, empezar transformando una locomotora ya equipada con motor de continua, parecía más sencillo que ponerse a tocar los motores de Märklin.
Aunque en el mercado hay decoders que permiten la digitalización sin tocar el motor, para la mayoría de mis máquinas me he decidido por decoders de sonido loksound… y claro, es inevitable la alteración del motor. Así que me he hecho con un par de loksounds en eBay (comprar en dólares ahora mismo tiene sus ventajas ;)) y un kit de digitalización lokpilot en jctren. El imán permanente del kit de digitalización me lo he guardado para otra transformación, y me he quedado con el lokpilot para digitalizar la Roco 43216.

Lo primero es separar la máquina del tender y ver el espacio disponible. Como se puede observar en las fotos, el motor está situado en el tender y ocupa casi todo el espacio. La instalación de un decoder de sonido resulta bastante difícil – imposible para un novato cómo yo – así que me he decidido por un LokPilot de reducido tamaño. La colocación irá sobre el tender, ya que el cuerpo de la máquina (macizo) tampoco deja espacio para cualquier otra alternativa.
 |
 |
Una vez retirado el motor, se encuentra una pequeña placa que sirve para captar la corriente de las ruedas y distribuirla a los diferentes elementos (motor y bombillas). La máquina por su lado también cuenta con captadores de corriente en las ruedas y su propia bombilla. Aunque no es necesario, la corriente circula del tender a la locomotora a través del enganche.
 |
 |
 |
Se precisan dos grandes modificaciones antes de pensar si quiera en la digitalización. Por un lado, dotar a la composición de una captación de corriente 3C, para lo que hay que instalar un patín y cortocircuitar las tomas de corriente por las ruedas para que actúen como retorno. Por otro lado, hay que aislar las luces del motor si queremos que la iluminación se pueda gobernar desde las funciones del decoder.
 |
 |
 |
 |
 |
El patín, se pega a una pequeña pieza de plástico que es desmontable usando pegamento y procurando que quede centrado. El resultado da paso a la última fase, la de cableado y conexión.
 |
 |
Como se aprecia en la foto del decoder, éste dispone de un conector NEM652 y, aunque todas las funciones se van a utilizar y por tanto el cable violeta (único no incluido en el conector) va a quedar soldado a alguna parte en la máquina, he pensado que sería interesante fabricarme mi propio conector NEM y facilitar la manipulación del decoder, evitar el corte de cables, etc.
En la foto se aprecia la pequeña placa de circuito impreso que he fabricado y el conector hembra.
El conector lo he cortado de una placa más larga, pero si se tiene acceso a un conector de 8 pines recomiendo no pasar por esta fase de corte.
 |
 |
 |
 |
Las conexiones a la placa se hacen siguiendo el manual del lokpilot. En mi caso el único contratiempo ha venido por el cable utilizado: demasiado grueso. El volumen de cable hacía que el motor se levantara, y he tenido que reubicar uno de los cortocircuitos de la tomas de corriente y hacerme con cable más fino para llevar hacia la luz delantera y función reservada para el fumígeno.
 |
 |
 |
 |
Al terminar el trabajo me he dado cuenta de que necesita aislar también la bombilla de delante, y de que en el cuerpo de la caldera hay un pequeño hueco por el que se pueden pasar cables de forma mucho más limpia de cómo yo lo he hecho, atrapados en el suelo y “demasiado” cerca de las ruedas.
 |
 |
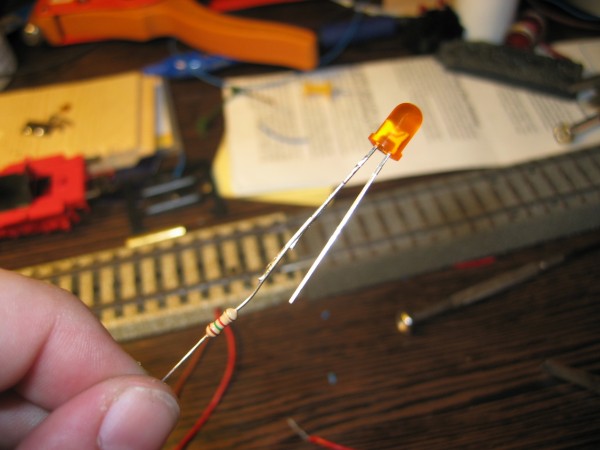
Con estos últimos cambios sólo falta hacer uso de la última función disponible en el decoder (cable violeta) para simular el fuego del hogar. El decoder se puede programar para dar una salida pseudoaleatorio que simula el comportamiento del fuego al encender y apagar un led. En mi caso he probado con un led naranja y el resultado es bastante bueno.
El led lo he soldado a una resistencia de 1k5Ω. Según mis cálculos 800Ω debería ser suficiente. Las salidas del decoder pueden dar hasta 250mA, y teniendo una tensión de 20V la limitación necesaria debería ser de 800Ω. En cualquier caso el manual de lokpilot recomienda valores entre 470Ω y 2k2Ω… un margen bastante generoso. El conjunto led-resistencia lo he metido en funda termorretráctil y tras la soldadura a los diferentes cables (función 2, cable violeta y cable azul del decoder, retorno 20V) lo he acomodado en el espacio tras la caldera aprovechando el agujero por el que pasa la transmisión del motor desde el tender.
 |
 |
 |
{kind=link}
Finalmente el resultado se aprecia en las siguientes fotos. Queda pendiente para una segunda fase de transformación cubrir el decoder en el tender con una nueva cubiernta de carbón – la original ya no entra bien – y aliviar un poco la transmisión motor del tender a la máquina, ya que al colocar el led de la hoguera ha quedado un poco aprisionada y roza.
 |
 |
hola. tengo una locomotora proto 1000 series c-liner a+b compuesta de dos motores es de corriente continua y me gustaria digitalizarla, pero como los dos motores tiene que funcionar a la vez tengo dudas.
me podrias ayudar te lo agradeceria mucho.
un saludo.
Comentario por Sergio millan — 18 octubre 2008 @ 19:39
Hola Sergio,
Lamentablemente nunca he digitalizado una locomotora de dos motores. Sé que los decoders de ESU van preparados para hacerlo, pero nunca he probado. Quizás alguien en el grupo de LCTM pueda ayudarte.
Comentario por Manolo — 25 octubre 2008 @ 21:05